4WD60mmメカナムホイールロボット(10021) [台車ロボット・研究開発]
57,899
本商品はArduino互換ボードを搭載した四輪駆動のメカナムホイールモバイルロボットです。
60mmアルミメカナムホイールと四つのコアレスエンコーダ式12V DCモータ、Arduino 328マイクロコントローラボード、Arduino IO 拡張ボードなどが搭載されており、センサの拡張なども容易です。
メカナムホイールを搭載しているため複雑になりがちなステアリング機構の制御などは必要なく、各ホイールの回転方向を制御するのみで全方位移動が可能です。
パーツリスト
●LEGO互換60mmアルミメカナムホイール4コセット(14144) X 1
●エンコーダ式12V DCモータX 4
●Arduino 328互換コントローラボード (22002) X 1
●Arduino 328互換コントローラ用 IO拡張ボード (22006) X 1
●12V NI-MHバッテリ X 1
●12V充電器 X1
【関連ワード:ロボット ロボカップ ロボコン ros slam センサ 組込み マイコン 教材 キャスター オムニホイール メカナムホール 台車 運搬 搬送 移動 販売 購入 ロボットカー 産業用 arduino 駆動 nexus ギアモータ エンコーダ 制御 物流 lrf 四輪 4輪 研究開発 Robotshop】
60mmアルミメカナムホイールと四つのコアレスエンコーダ式12V DCモータ、Arduino 328マイクロコントローラボード、Arduino IO 拡張ボードなどが搭載されており、センサの拡張なども容易です。
メカナムホイールを搭載しているため複雑になりがちなステアリング機構の制御などは必要なく、各ホイールの回転方向を制御するのみで全方位移動が可能です。
パーツリスト
●LEGO互換60mmアルミメカナムホイール4コセット(14144) X 1
●エンコーダ式12V DCモータX 4
●Arduino 328互換コントローラボード (22002) X 1
●Arduino 328互換コントローラ用 IO拡張ボード (22006) X 1
●12V NI-MHバッテリ X 1
●12V充電器 X1
【関連ワード:ロボット ロボカップ ロボコン ros slam センサ 組込み マイコン 教材 キャスター オムニホイール メカナムホール 台車 運搬 搬送 移動 販売 購入 ロボットカー 産業用 arduino 駆動 nexus ギアモータ エンコーダ 制御 物流 lrf 四輪 4輪 研究開発 Robotshop】
ロボット導入時にご活用いただける日本語マニュアルをご用意いたしました。
四輪駆動の小型メカナムホイールモバイルロボット
60mmの小型メカナムホイールを搭載した台車ロボットです。小型ながらメカナムホイールの制御に必要な要件を抑えた仕様です。センサー類の搭載がないシンプルな構成となっているため、メカナムホイールの制御に特化して学ぶことができます。エンコーダ付きDCモータを搭載しておりますので、メカナムホイールに欠かせない回転数の制御はもちろん可能です。
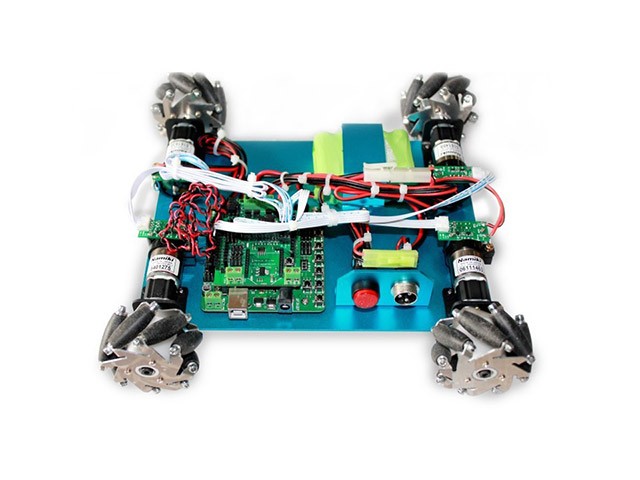
4輪駆動メカナムホイールを搭載
各車輪の回転方向や速度を変えることであらゆる方向へ安定した移動ができます。4輪を同時に同方向へ回転させることによって前進・後退ができ、左右を逆方向へ回転することで旋回、前後を逆回転することで横向きに移動することができます。3輪タイプと比較して、4つの駆動輪を搭載することにより、動作時・静止時の車体安定性の向上を実現しました。

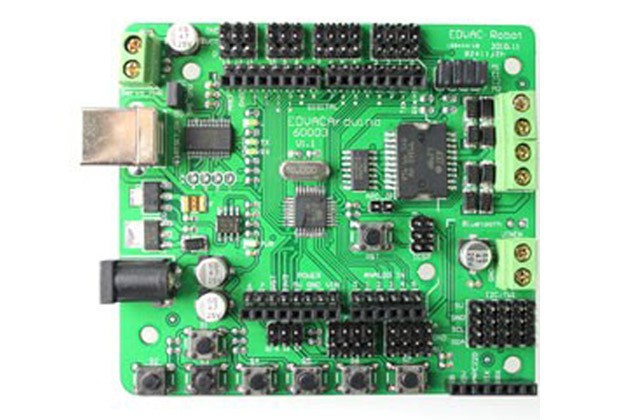
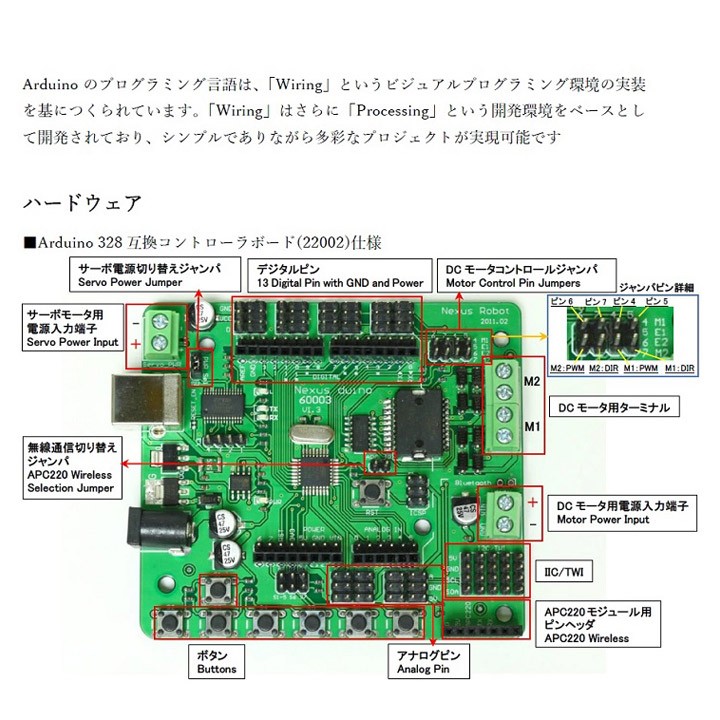
Arduino互換ボードとIO拡張ボードを搭載
14本のデジタル入力/出力ピン(このうち6本はPWM出力として使えます)と8本のアナログ入力、1個の16 MHz クリスタル発振器、1個のUSBコネクタ、1個のパワージャック、1個のICSPヘッダーと1個のリセットボタンを搭載したArduino互換ボードを搭載しております。
マイクロコントローラをサポートするのに必要な機能を全て装備しています。このボードによりC、C++でのプログラミングが可能となっています。
開発環境は無償で利用可能な「Arduino IDE」
Arduino(アルディーノ/アルドゥイーノ)はオープンソースのハードウェアとして開発されているため、世界中で公開されている膨大な量のサンプルコードを利用し、簡単にプログラムすることが可能です。本商品もArduino互換ボードを採用しておりますので、無償で利用可能なArduinoIDEを用いてのプログラミングが可能です。まずはご購入後にダウンロード可能なサンプルプログラムを参考に、様々な応用をお試しください。
※プログラムの内容や改変などについてのサポートは付属しておりません。
日本語マニュアルをご用意
本商品をご利用の際は、英語マニュアルをご参照いただく形となっておりましたが、この度、ご利用にあたっての導入部分を日本語訳した日本語マニュアルをご用意いたしました。
導入にあたり不明な点を日本語にてカバーしておりますので、安心して初期のセットアップに取り組んでいただけます。
日本語マニュアルはヴイストン ロボットショップにてご購入いただいたものにのみ付属しております。
※あくまで初期導入部分に限らせていただいております。詳細なプログラムの内容などは英語マニュアルをご参照ください。
回転方向による移動特性

パーツリスト
- Arduino 328互換コントローラボード (22002) ×1
- Arduino 328互換コントローラ用 IO拡張ボード (22006)×1
- LEGO互換60mmアルミメカナムホイール4コセット(14144)×1
- エンコーダ式12V DCモータ×4
- 12V Ni-Mh バッテリ×1
- 12V 充電器×1
※ホイールのみ外れた状態で納品となります。お客様での取り付けが必要です。
また、バッテリのコネクタは外れた状態が基本です。動作前にコネクタの接続を行なってください。


製品仕様
| サイズ | 240(W)×240(D)×180(H)[mm] |
| 重量 | 約1.5kg |
| 負荷重量 | 2kg |
| 速度 | 0.2m/s |
| モータ動力 | 6W |
| モータ | 12V エンコーダ式DCモータ |
| 電源 | 12V Ni-Mh バッテリ |
モータ仕様
| 型式 | 12V DCコアレスモータ |
| 非負荷時速度 | 9600RPM/minute |
| 定格回転数 | 120RPM/minute |
| 直径 | 22mm |
| 長さ | 19mm |
| 全長 | 65mm |
| シャフトの直径 | 4mm |
| 非負荷時の電流 | 50mA |
| 負荷電流 | 500mA |
| ギアボックス比率 | 80:1 |
エンコーダ仕様
| 型式 | 光学式 |
| エンコーダ位相 | AB |
| エンコーダ解像度 | 4CPR |
CPUボード仕様
| マイクロコントローラ | ATmega168 |
| 作動電圧 | 5V |
| 入力電圧 (推奨) | 7-12V |
| 入力電圧(可能範囲) | 6-20V |
| デジタルI/O ピン | 14 (6本はPWM出力として利用可) |
| アナログ入力ピン | 8 |
| DC電流 | 40mA(I/Oピン)、50mA(3.3Vピン) |
| フラッシュメモリー | 32 KB(2KBはブートローダ用) |
| SRAM | 1KB(ATmega168) または 2KB(ATmega328) |
| EEPROM | 512バイト(ATmega168)もしくは1KB(ATmega328) |
| クロックスピード | 16 MHz |
※製品仕様その他は、予告なく変更する場合がございます。